Tokyo/Madrid, August 2022
 eProsima is proud to announce the DDS Router as a joint effort with Rapyuta Robotics. This open-source end-user software enables communication of geographically distributed DDS networks, such as the Cloud-Edge scenario.
eProsima is proud to announce the DDS Router as a joint effort with Rapyuta Robotics. This open-source end-user software enables communication of geographically distributed DDS networks, such as the Cloud-Edge scenario.
Rapyuta Robotics offers the world’s first all-in-one DevOps platform for cloud-connected robots, rapyuta.io, and as such is looking for ways to interconnect other robotic platform solutions, like for example ROS (Robot Operating System), and other DDS networks.
eProsima, the middleware experts, is the company behind Fast DDS. The company’s DDS (Data Distribution Service) standard-based communication middleware is used for robotics, distributed networks and is also the default middleware for the ROS 2 Foxy and Humble LTS distributions.
The Rapyuta Robotics’s cloud infrastructure supports the deployment of ROS 2 on geographically distributed machines in a simple way. However, the problem arises of how to communicate these nodes efficiently using the same communication protocol used by the ROS 2 nodes, i.e. DDS. This way the DDS Router emerges, enabling the communication of distributed applications that understand the DDS protocol without the need to modify the end-user application or perform complex network configurations.
As experts in DDS middleware and robotic cloud solutions respectively, eProsima developed the DDS Router together with Rapyuta Robotics as the first open-source WAN connector for DDS networks in the Cloud and Edge. This software enables users to route DDS mesh and cloud-based networks through WAN communication over UDP and/or TCP. Moreover, it is designed to be an easily configurable modular system.
The following image represents the Rapyuta’s Cloud scenario, previously unattainable, where various DDS networks could be connected and communicating with each other, independently of their physical location and network configuration (NAT, WAN, etc.), just by deploying a DDS Router on each network. It also unlocks the possibility to maintain a Cloud cluster where standard ROS 2 Nodes could gather data, control the network or just participate as another node of the network.
This scenario involves a ROS 2 controller in the Cloud sending commands to the edge robots built with the ROS 2 framework. Multiple DDS Routers are deployed, one in the Cloud and one in each DDS network so that they gather all the information transmitted in their DDS network and relay it to the other DDS Routers to which they are connected.
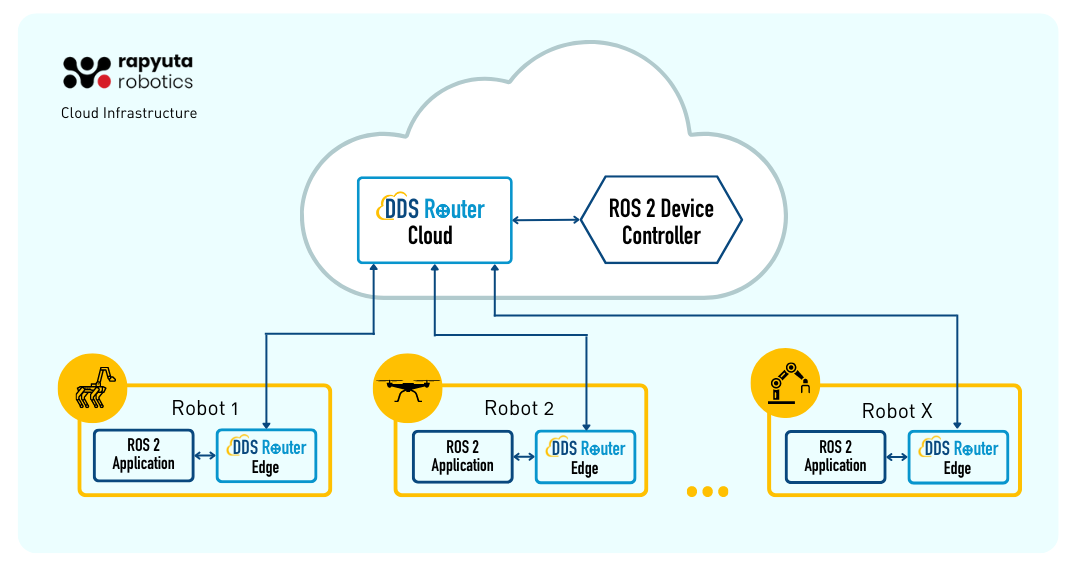
The number of robots is not a limitation here as they could grow dynamically along the scenario. Neither is the location of those robots, allowing those under the same machine or same network to communicate more efficiently using standard DDS, but enabling the possibility to forward communications to the whole internet. This message redirection could be filtered to avoid redundant or useless internal information, with very simple configuration files, that could be updated at any time to reconfigure the network filtering.
ABOUT Rapyuta Robotics
Rapyuta Robotics is a technology startup with offices in India and Japan dedicated to developing cloud robotics solutions. The company’s mission is to lower the entry barriers for businesses to deploy automatization solutions by offering an end-user-friendly robot hardware and software infrastructure, called rapyuta.io. It is the world’s first all-in-one DevOps platform for cloud-connected robots.
ABOUT EPROSIMA
eProsima is an SME company focused on networking middleware with special attention to the OMG (Object Management Group) standard called Data Distribution Service (DDS) for real time systems. The company’s DDS middleware solutions find special interest in the robotic, IoT and automotive sector, being Fast DDS a middleware implementations for larger robotic systems like ROS 2 and Micro XRCE-DDS the default middleware for micro-ROS, a robot operating system for microcontrollers.
FOR MORE INFORMATION ABOUT EPROSIMA:
Please contact
